作者其它图纸
查看更多




猜你喜欢


| # | 文件名称 | 文件大小 |
|---|---|---|
| 1 | +必看说明+.txt | 2.22 KB |
| 2 | .gitignore | 15 B |
| 3 | .travis.yml | 246 B |
| 4 | 01FZ]BDS7`T$VIK8~FD{QKB.png | 324 KB |
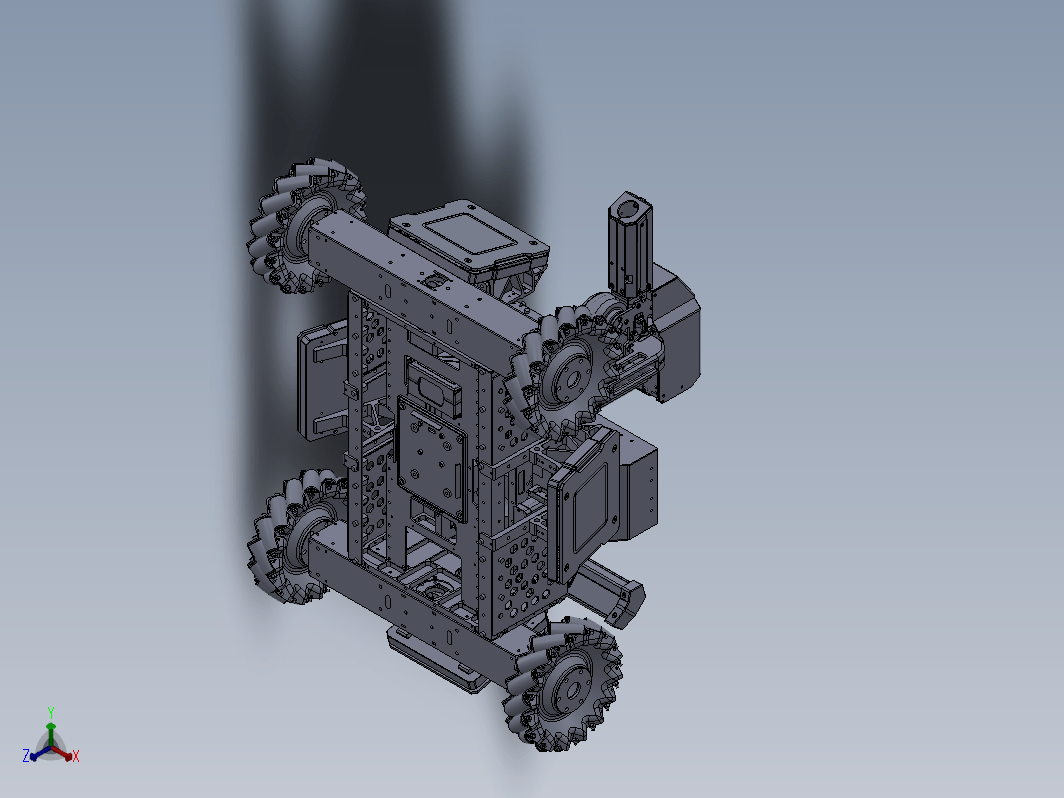
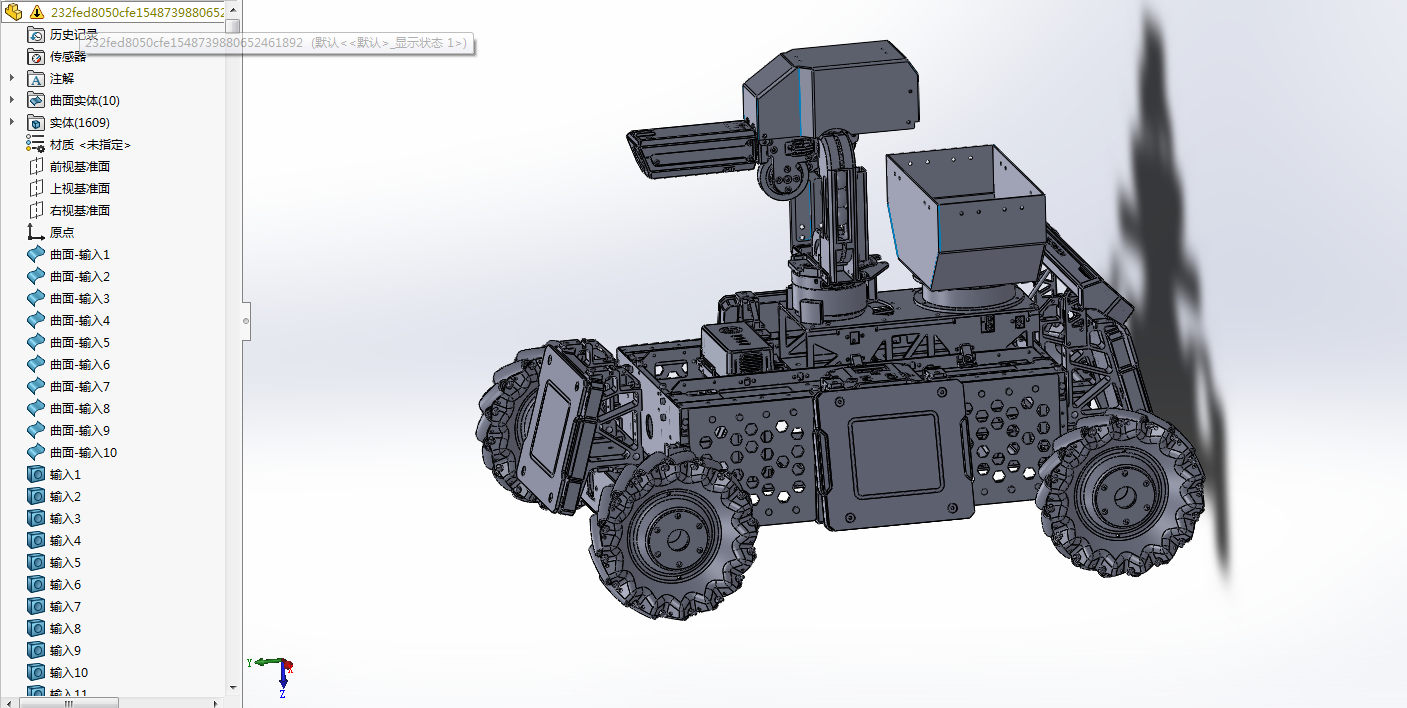
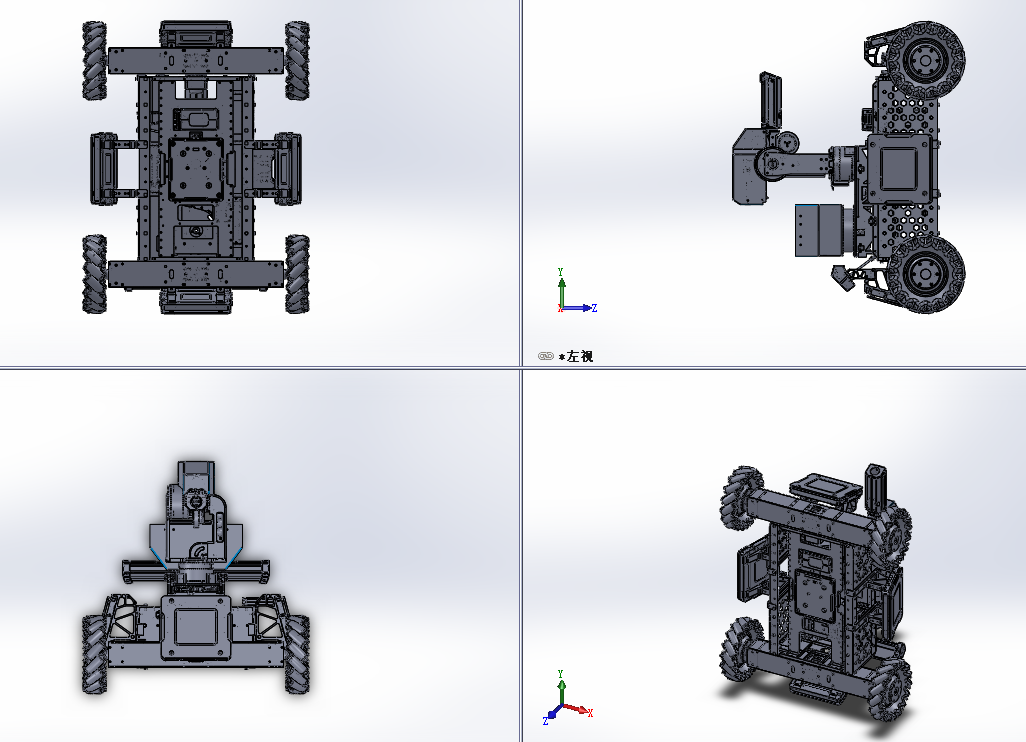
| 5 | 232fed8050cfe1548739880652461892.SLDPRT | 75 MB |
| 6 | ArmorDetection.action | 267 B |
| 7 | BonusStatus.msg | 115 B |
| 8 | CMakeLists.txt | 1.01 KB |
| 9 | CMakeLists.txt | 1.08 KB |
| 10 | CMakeLists.txt | 1.17 KB |
| 11 | CMakeLists.txt | 1.17 KB |
| 12 | CMakeLists.txt | 1.58 KB |
| 13 | CMakeLists.txt | 1.59 KB |
| 14 | CMakeLists.txt | 1.67 KB |
| 15 | CMakeLists.txt | 134 B |
| 16 | CMakeLists.txt | 135 B |
| 17 | CMakeLists.txt | 144 B |
| 18 | CMakeLists.txt | 225 B |
| 19 | CMakeLists.txt | 302 B |
| 20 | CMakeLists.txt | 317 B |
| 21 | CMakeLists.txt | 332 B |
| 22 | CMakeLists.txt | 355 B |
| 23 | CMakeLists.txt | 369 B |
| 24 | CMakeLists.txt | 554 B |
| 25 | CMakeLists.txt | 566 B |
| 26 | CMakeLists.txt | 583 B |
| 27 | CMakeLists.txt | 593 B |
| 28 | CMakeLists.txt | 616 B |
| 29 | CMakeLists.txt | 653 B |
| 30 | CMakeLists.txt | 812 B |
| 31 | CMakeLists.txt | 832 B |
| 32 | CMakeLists.txt | 870 B |
| 33 | CMakeLists.txt | 902 B |
| 34 | COPYING.txt | 35.2 KB |
| 35 | FindEigen3.cmake | 3.3 KB |
| 36 | FindEigen3.cmake | 3.3 KB |
| 37 | FindEigen3.cmake | 3.3 KB |
| 38 | FindEigen3.cmake | 3.3 KB |
| 39 | FindEigen3.cmake | 3.3 KB |
| 40 | FindEigen3.cmake | 3.3 KB |
| 41 | FindG2O.cmake | 3.2 KB |
| 42 | FindGTEST.cmake | 355 B |
| 43 | FindGlog.cmake | 1.42 KB |
| 44 | FindGlog.cmake | 1.42 KB |
| 45 | FindGlog.cmake | 1.42 KB |
| 46 | FindProtoBuf.cmake | 3.61 KB |
| 47 | FindProtoBuf.cmake | 3.61 KB |
| 48 | FindProtoBuf.cmake | 3.61 KB |
| 49 | FindProtoBuf.cmake | 3.61 KB |
| 50 | FindProtoBuf.cmake | 3.61 KB |
| 51 | FindProtoBuf.cmake | 3.61 KB |
| 52 | FindSUITESPARSE.cmake | 5.22 KB |
| 53 | FricWhl.srv | 28 B |
| 54 | GameResult.msg | 76 B |
| 55 | GameStatus.msg | 167 B |
| 56 | GameSurvivor.msg | 58 B |
| 57 | GimbalAngle.msg | 96 B |
| 58 | GimbalMode.srv | 36 B |
| 59 | GimbalRate.msg | 59 B |
| 60 | GlobalPlanner.action | 208 B |
| 61 | HI4{%8PMEC9EA0VV~BVY`E7.png | 397 KB |
| 62 | ICRA 2019 RoboMaster AI Challenge Rules Manual V1.0.pdf | 1.39 MB |
| 63 | KCFCpp.sh | 6 B |
| 64 | KCFLabCpp.sh | 10 B |
| 65 | LICENSE | 1.44 KB |
| 66 | LocalPlanner.action | 164 B |
| 67 | ObstacleMsg.msg | 1 KB |
| 68 | ProjectileSupply.msg | 32 B |
| 69 | README.md | 0 B |
| 70 | README.md | 1.97 KB |
| 71 | README.md | 2.41 KB |
| 72 | RoboRTS-Firmware-icra2020.zip | 38 MB |
| 73 | RoboRTS-ros.zip | 1.19 MB |
| 74 | RobotBonus.msg | 24 B |
| 75 | RobotDamage.msg | 201 B |
| 76 | RobotHeat.msg | 142 B |
| 77 | RobotShoot.msg | 48 B |
| 78 | RobotStatus.msg | 175 B |
| 79 | ShootCmd.srv | 93 B |
| 80 | ShootInfo.msg | 144 B |
| 81 | ShootState.msg | 91 B |
| 82 | SupplierStatus.msg | 87 B |
| 83 | TwistAccel.msg | 51 B |
| 84 | a_star_planner.cpp | 10.9 KB |
| 85 | a_star_planner.h | 5.41 KB |
| 86 | a_star_planner_config.proto | 262 B |
| 87 | a_star_planner_config.prototxt | 72 B |
| 88 | algorithm_factory.h | 6.93 KB |
| 89 | amcl.cpp | 17.1 KB |
| 90 | amcl.h | 6.48 KB |
| 91 | amcl.yaml | 1.11 KB |
| 92 | amcl_config.h | 3.5 KB |
| 93 | amcl_map.cpp | 8.53 KB |
| 94 | amcl_map.h | 6.34 KB |
| 95 | armor_detection.proto | 666 B |
| 96 | armor_detection.prototxt | 326 B |
| 97 | armor_detection_algorithms.h | 1.09 KB |
| 98 | armor_detection_base.h | 1.54 KB |
| 99 | armor_detection_client.cpp | 2.76 KB |
| 100 | armor_detection_node.cpp | 7.9 KB |
| 101 | armor_detection_node.h | 3.4 KB |
| 102 | back_boot_area_behavior.h | 3.36 KB |
| 103 | base.launch | 280 B |
| 104 | behavior_node.h | 25.1 KB |
| 105 | behavior_state.h | 459 B |
| 106 | behavior_test.cpp | 3.08 KB |
| 107 | behavior_tree.h | 2.74 KB |
| 108 | bind_this.h | 1.64 KB |
| 109 | blackboard.h | 7.61 KB |
| 110 | camera_base.h | 1.7 KB |
| 111 | camera_node.cpp | 3.06 KB |
| 112 | camera_node.h | 2.49 KB |
| 113 | camera_param.cpp | 4.38 KB |
| 114 | camera_param.h | 2.98 KB |
| 115 | camera_param.proto | 928 B |
| 116 | camera_param.prototxt | 591 B |
| 117 | chase_behavior.h | 5.35 KB |
| 118 | chassis.cpp | 6.97 KB |
| 119 | chassis.h | 3.59 KB |
| 120 | chassis_executor.cpp | 4.07 KB |
| 121 | chassis_executor.h | 3.3 KB |
| 122 | circular_buffer.h | 3.33 KB |
| 123 | constraint_set.cpp | 19.4 KB |
| 124 | constraint_set.h | 7.78 KB |
| 125 | constraint_set.proto | 1.14 KB |
| 126 | constraint_set.prototxt | 530 B |
| 127 | costmap_2d.cpp | 12.7 KB |
| 128 | costmap_2d.h | 17 KB |
| 129 | costmap_interface.cpp | 18 KB |
| 130 | costmap_interface.h | 8.55 KB |
| 131 | costmap_layer.cpp | 6.17 KB |
| 132 | costmap_layer.h | 6.28 KB |
| 133 | costmap_math.cpp | 4.02 KB |
| 134 | costmap_math.h | 3.38 KB |
| 135 | costmap_parameter_config_for_decision.prototxt | 686 B |
| 136 | costmap_parameter_config_for_global_plan.prototxt | 686 B |
| 137 | costmap_parameter_config_for_local_plan.prototxt | 692 B |
| 138 | costmap_parameter_setting.proto | 1.11 KB |
| 139 | crc.h | 8.13 KB |
| 140 | create_udev_rules.sh | 401 B |
| 141 | create_upstart_service.sh | 682 B |
| 142 | cv_toolbox.h | 9.65 KB |
| 143 | data_base.h | 7.64 KB |
| 144 | data_converter.h | 4.19 KB |
| 145 | decision.proto | 1.39 KB |
| 146 | decision.prototxt | 2.27 KB |
| 147 | delete_udev_rules.sh | 292 B |
| 148 | delete_upstart_service.sh | 504 B |
| 149 | dispatch.h | 11.4 KB |
| 150 | distance_calculation.h | 10.3 KB |
| 151 | error_code.h | 3.15 KB |
| 152 | escape_behavior.h | 6.24 KB |
| 153 | execution.cpp | 2.46 KB |
| 154 | execution.h | 2.32 KB |
| 155 | ffttools.hpp | 6.59 KB |
| 156 | fhog.cpp | 16.7 KB |
| 157 | fhog.hpp | 5.47 KB |
| 158 | footprint.cpp | 6.37 KB |
| 159 | footprint.h | 6.59 KB |
| 160 | geometry.h | 5.64 KB |
| 161 | gimbal.cpp | 7.59 KB |
| 162 | gimbal.h | 4.27 KB |
| 163 | gimbal_control.cpp | 2.29 KB |
| 164 | gimbal_control.h | 2.79 KB |
| 165 | gimbal_executor.cpp | 1.66 KB |
| 166 | gimbal_executor.h | 1.78 KB |
| 167 | global_planner_algorithms.h | 1.07 KB |
| 168 | global_planner_base.h | 1.68 KB |
| 169 | global_planner_config.proto | 323 B |
| 170 | global_planner_config.prototxt | 158 B |
| 171 | global_planner_node.cpp | 12.1 KB |
| 172 | global_planner_node.h | 6.88 KB |
| 173 | global_planner_test.cpp | 2.9 KB |
| 174 | goal_behavior.h | 984 B |
| 175 | handle.cpp | 1.92 KB |
| 176 | handle.h | 7.29 KB |
| 177 | hardware_interface.h | 1.28 KB |
| 178 | hcp.prototxt | 637 B |
| 179 | icra2018.pgm | 18 KB |
| 180 | icra2018.world | 1.47 KB |
| 181 | icra2018.yaml | 114 B |
| 182 | icra2019.pgm | 16.4 KB |
| 183 | icra2019.world | 1.47 KB |
| 184 | icra2019.yaml | 114 B |
| 185 | image_capture.cpp | 1.64 KB |
| 186 | inflation_layer.cpp | 12.3 KB |
| 187 | inflation_layer.h | 6.96 KB |
| 188 | inflation_layer_config.prototxt | 85 B |
| 189 | inflation_layer_config_min.prototxt | 86 B |
| 190 | inflation_layer_setting.proto | 238 B |
| 191 | io.h | 3.6 KB |
| 192 | jetson_clocks.sh | 10 KB |
| 193 | kcftracker.cpp | 18.6 KB |
| 194 | kcftracker.hpp | 6.04 KB |
| 195 | labdata.hpp | 617 B |
| 196 | layer.cpp | 3.07 KB |
| 197 | layer.h | 5.33 KB |
| 198 | layered_costmap.cpp | 5.81 KB |
| 199 | layered_costmap.h | 5.68 KB |
| 200 | line_iterator.h | 2.54 KB |
| 201 | line_iterator.h | 3.7 KB |
| 202 | local_planner.proto | 188 B |
| 203 | local_planner.prototxt | 94 B |
| 204 | local_planner_algorithms.h | 1.19 KB |
| 205 | local_planner_base.h | 4.92 KB |
| 206 | local_planner_node.cpp | 9.41 KB |
| 207 | local_planner_node.h | 4.67 KB |
| 208 | local_visualization.cpp | 2.3 KB |
| 209 | local_visualization.h | 2.49 KB |
| 210 | localization.yaml | 469 B |
| 211 | localization_config.h | 2.97 KB |
| 212 | localization_math.cpp | 7.26 KB |
| 213 | localization_math.h | 4.92 KB |
| 214 | localization_node.cpp | 12.9 KB |
| 215 | localization_node.h | 4.51 KB |
| 216 | log.h | 1.97 KB |
| 217 | log.h | 2.13 KB |
| 218 | map_common.h | 3.11 KB |
| 219 | mapping.launch | 792 B |
| 220 | mapping.rviz | 6.5 KB |
| 221 | mapping_stage.launch | 616 B |
| 222 | math.h | 12.7 KB |
| 223 | max-performance.service | 171 B |
| 224 | max_performance.sh | 209 B |
| 225 | memory_pool.h | 8.71 KB |
| 226 | node_state.h | 1.03 KB |
| 227 | observation.h | 4.72 KB |
| 228 | observation_buffer.cpp | 10.8 KB |
| 229 | observation_buffer.h | 6.8 KB |
| 230 | obstacle.h | 14.2 KB |
| 231 | obstacle_layer.cpp | 17 KB |
| 232 | obstacle_layer.h | 5.5 KB |
| 233 | obstacle_layer_config.prototxt | 314 B |
| 234 | obstacle_layer_setting.proto | 644 B |
| 235 | obstacles.cpp | 6.83 KB |
| 236 | odom_info.cpp | 2.17 KB |
| 237 | odom_info.h | 2.11 KB |
| 238 | optimal_base.h | 6.78 KB |
| 239 | package.xml | 1.04 KB |
| 240 | package.xml | 737 B |
| 241 | package.xml | 749 B |
| 242 | package.xml | 792 B |
| 243 | package.xml | 797 B |
| 244 | package.xml | 819 B |
| 245 | package.xml | 926 B |
| 246 | package.xml | 932 B |
| 247 | package.xml | 977 B |
| 248 | package.xml | 977 B |
| 249 | package.xml | 978 B |
| 250 | package.xml | 980 B |
| 251 | particle_filter.cpp | 15.5 KB |
| 252 | particle_filter.h | 5.49 KB |
| 253 | particle_filter_gaussian_pdf.cpp | 2.65 KB |
| 254 | particle_filter_gaussian_pdf.h | 2.81 KB |
| 255 | particle_filter_kdtree.cpp | 7.13 KB |
| 256 | particle_filter_kdtree.h | 4.41 KB |
| 257 | particle_filter_sample.h | 3.63 KB |
| 258 | patrol_behavior.h | 2.83 KB |
| 259 | protocol.cpp | 36.1 KB |
| 260 | protocol.h | 19.3 KB |
| 261 | protocol_define.h | 7.24 KB |
| 262 | recovery.prototxt | 254 B |
| 263 | recttools.hpp | 4.24 KB |
| 264 | referee_system.cpp | 11.2 KB |
| 265 | referee_system.h | 2.59 KB |
| 266 | roborts-start.sh | 91 B |
| 267 | roborts.launch | 1.51 KB |
| 268 | roborts.rules | 229 B |
| 269 | roborts.rviz | 6.48 KB |
| 270 | roborts.service | 189 B |
| 271 | roborts_base_config.h | 1.13 KB |
| 272 | roborts_base_node.cpp | 1.44 KB |
| 273 | roborts_base_parameter.yaml | 31 B |
| 274 | roborts_stage.launch | 1.45 KB |
| 275 | robot.jpg | 724 KB |
| 276 | robot.jpg | 724 KB |
| 277 | robot_footprint_model.h | 9.97 KB |
| 278 | robot_position_cost.cpp | 4.25 KB |
| 279 | robot_position_cost.h | 8.16 KB |
| 280 | ros_dep.h | 1.78 KB |
| 281 | runtracker.cpp | 2.98 KB |
| 282 | sdk.h | 1.03 KB |
| 283 | sdk_test.cpp | 2.69 KB |
| 284 | search_behavior.h | 7.51 KB |
| 285 | sensor_laser.cpp | 10.3 KB |
| 286 | sensor_laser.h | 5.83 KB |
| 287 | sensor_odom.cpp | 4.36 KB |
| 288 | sensor_odom.h | 3.26 KB |
| 289 | serial_device.cpp | 4.86 KB |
| 290 | serial_device.h | 2.99 KB |
| 291 | slam_gmapping.xml | 1.36 KB |
| 292 | static_layer.cpp | 8.44 KB |
| 293 | static_layer.h | 3.96 KB |
| 294 | static_layer_config.prototxt | 213 B |
| 295 | static_layer_setting.proto | 462 B |
| 296 | static_tf.launch | 443 B |
| 297 | system.png | 60.8 KB |
| 298 | teb_acceleration_eage.h | 16.2 KB |
| 299 | teb_base_eage.h | 6.25 KB |
| 300 | teb_kinematics_edge.h | 7.08 KB |
| 301 | teb_local_planner.cpp | 24.3 KB |
| 302 | teb_local_planner.h | 7.75 KB |
| 303 | teb_obstacle_eage.h | 5.45 KB |
| 304 | teb_optimal.cpp | 38.8 KB |
| 305 | teb_optimal.h | 9.25 KB |
| 306 | teb_penalties.h | 4.47 KB |
| 307 | teb_prefer_rotdir_edge.h | 4 KB |
| 308 | teb_test.cpp | 8.83 KB |
| 309 | teb_test.rviz | 5.61 KB |
| 310 | teb_time_optimal_eage.h | 3.8 KB |
| 311 | teb_velocity_eage.h | 6.41 KB |
| 312 | teb_vertex_console.cpp | 16.7 KB |
| 313 | teb_vertex_console.h | 8.13 KB |
| 314 | teb_vertex_pose.h | 4.02 KB |
| 315 | teb_vertex_timediff.h | 3.93 KB |
| 316 | teb_via_point_edge.h | 3.82 KB |
| 317 | test_costmap.cpp | 3.46 KB |
| 318 | timed_elastic_band.hpp | 6.69 KB |
| 319 | timed_elastic_band.proto | 5.05 KB |
| 320 | timed_elastic_band.prototxt | 2.01 KB |
| 321 | timer.h | 1.08 KB |
| 322 | tracker.h | 1.3 KB |
| 323 | tracking_test.cpp | 5.8 KB |
| 324 | tracking_utility.cpp | 2.5 KB |
| 325 | tracking_utility.h | 1.8 KB |
| 326 | types.h | 1.29 KB |
| 327 | utility_tool.h | 3.37 KB |
| 328 | uvc_driver.cpp | 2.25 KB |
| 329 | uvc_driver.h | 2.08 KB |
| 330 | vel_converter.cpp | 3.06 KB |
| 331 | ~$232fed8050cfe1548739880652461892.SLDPRT | 14 B |
| 332 | 【 屿双网 www.ysh3d.com 】 更多【资料】【图档】.url | 177 B |
| 333 | 公众号免费下载.jpg | 79 KB |



下载该图档需要消耗0金币!