作者其它图纸
查看更多


猜你喜欢



| # | 文件名称 | 文件大小 |
|---|---|---|
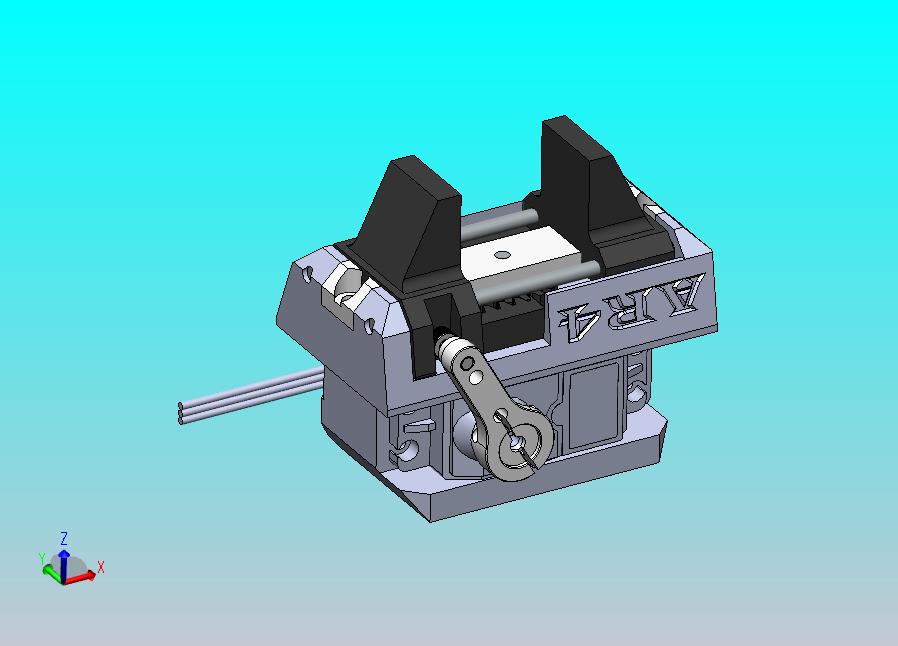
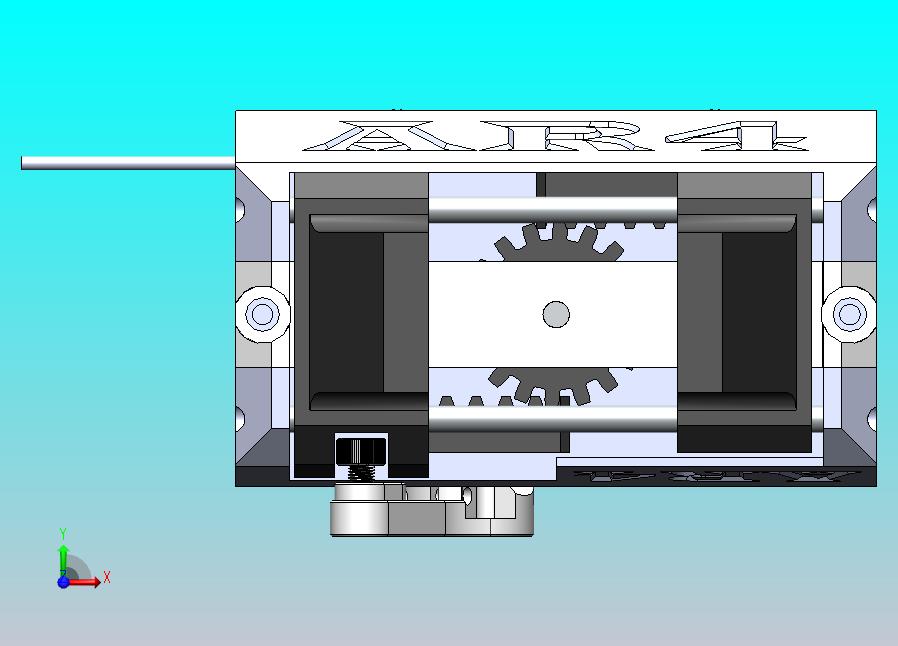
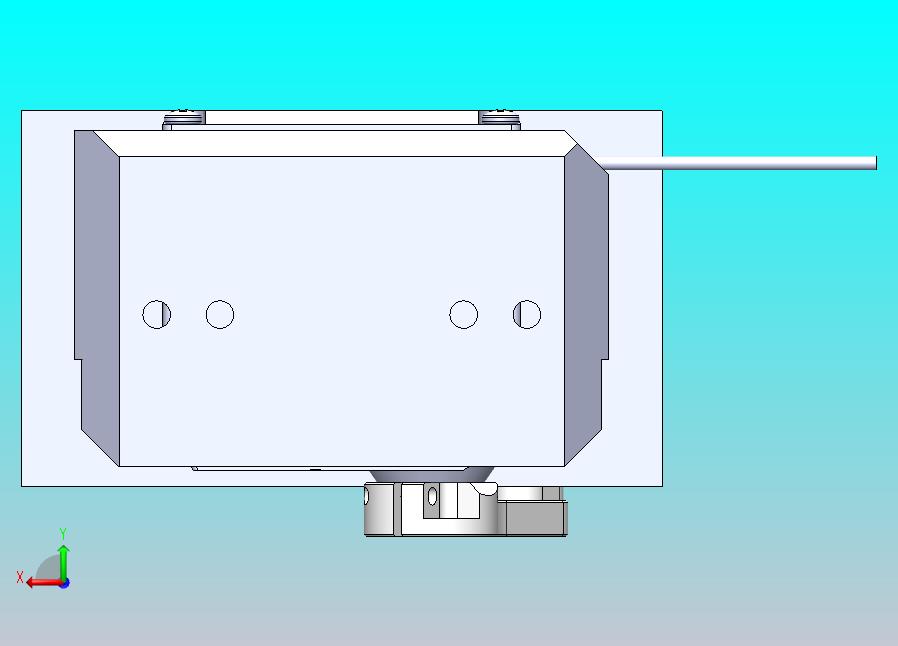
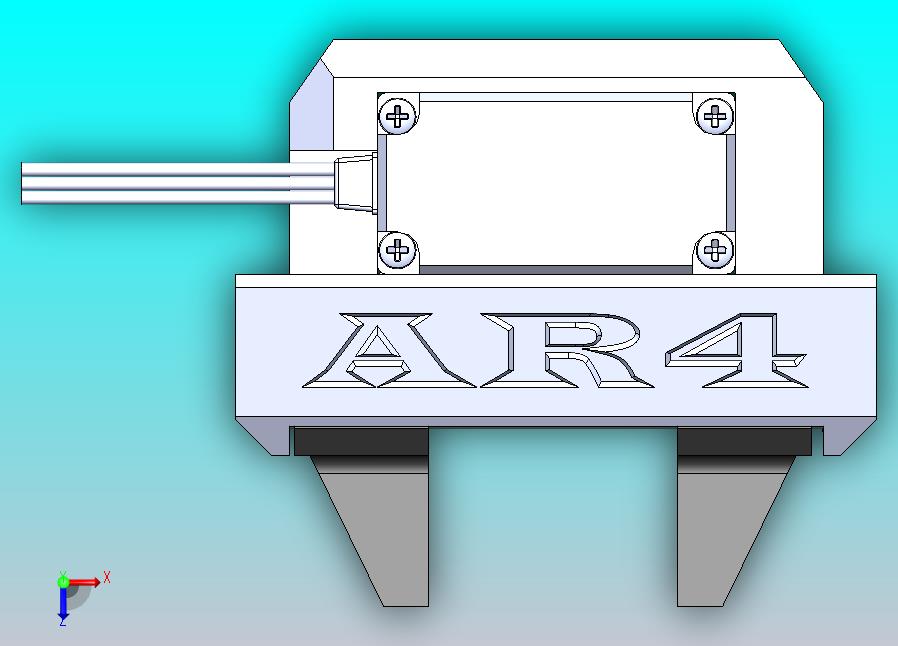
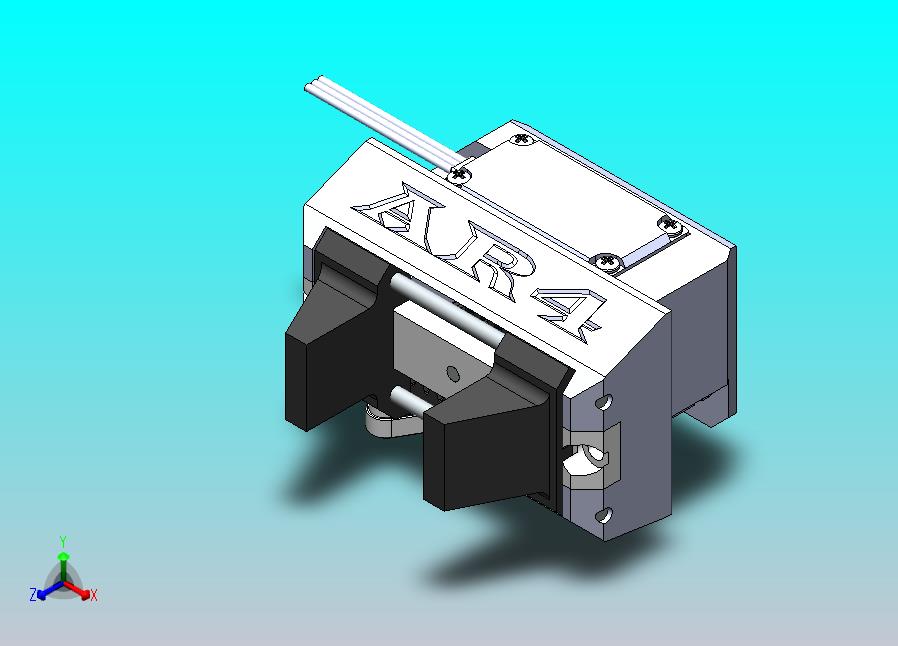
| 1 | AR4 robot arm servo gripper.jpg | 190 KB |
| 2 | AR4_SG1_16.5_gear_rod.SLDPRT | 205 KB |
| 3 | AR4_SG1_70mm_carriage_rod.SLDPRT | 116 KB |
| 4 | AR4_SG1_assembly.SLDASM | 1.73 MB |
| 5 | AR4_SG1_base.SLDPRT | 126 KB |
| 6 | AR4_SG1_base.STEP | 183 KB |
| 7 | AR4_SG1_base.STL | 1.34 MB |
| 8 | AR4_SG1_carriage.SLDPRT | 301 KB |
| 9 | AR4_SG1_carriage.STEP | 742 KB |
| 10 | AR4_SG1_carriage.STL | 1.6 MB |
| 11 | AR4_SG1_center_bar.SLDPRT | 135 KB |
| 12 | AR4_SG1_center_bar.STEP | 72.1 KB |
| 13 | AR4_SG1_center_bar.STL | 345 KB |
| 14 | AR4_SG1_gear.SLDPRT | 187 KB |
| 15 | AR4_SG1_gear.STEP | 321 KB |
| 16 | AR4_SG1_gear.STL | 900 KB |
| 17 | AR4_SG1_gear_rod.SLDPRT | 205 KB |
| 18 | AR4_SG1_jaw1.SLDPRT | 132 KB |
| 19 | AR4_SG1_jaw1.STEP | 212 KB |
| 20 | AR4_SG1_jaw1.STL | 443 KB |
| 21 | AR4_SG1_jaw2.SLDPRT | 129 KB |
| 22 | AR4_SG1_jaw2.STEP | 195 KB |
| 23 | AR4_SG1_jaw2.STL | 442 KB |
| 24 | M3x8 cap screw.SLDPRT | 1.71 MB |
| 25 | Servo 25Kg.SLDPRT | 828 KB |
| 26 | Servo Arm.SLDPRT | 337 KB |


下载该图档需要消耗10金币!